RoboErgoSum Project
There is an intricate relationship between self-awareness and the ability to perform cognitive-level reasoning.
Integrative Architecture.
The global architecture integrates perception, decision and action. The architecture depicted in Fig. 1 is a prefiguration concept of the system that will be developed and experimented. This architecture should enable to achieve the capacities described above, and one of its major properties is to include a permanent learning activity. This, we believe, is the only manner to achieve an open-ended system, i.e., a system able to operate without strong a priori limitations due to pre-defined representations or operational capabilities. Learning should be pervasive and present at all levels and in every process.
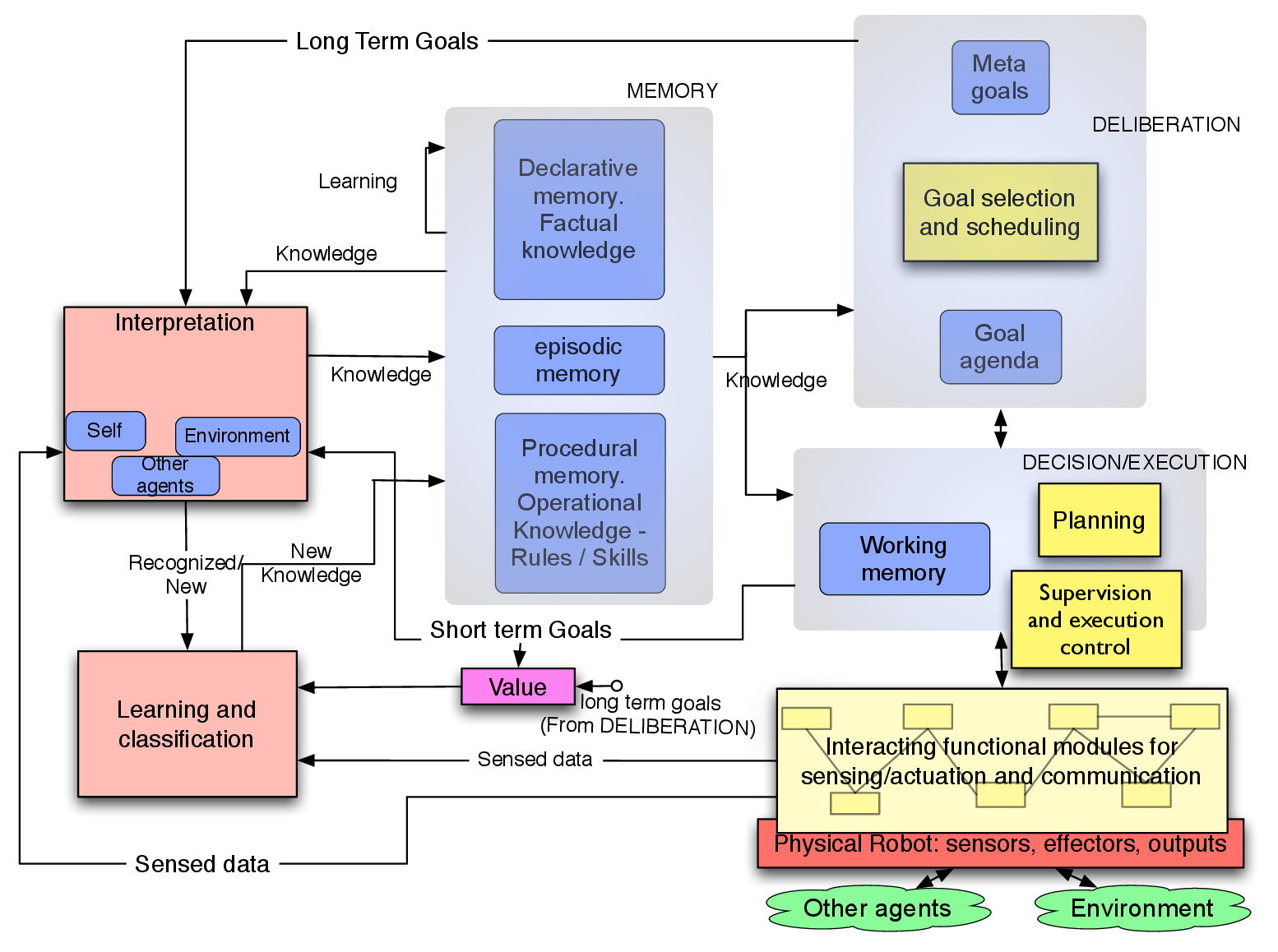
Figure 1: Conceptual robot architecture enabling self-awareness.
Approach. We hypothesize two levels of decision-making. The decision-execution subsystem is the decisional component of a three-level architecture, and the set of "interacting modules" is its functional level. Thus the conceptual architecture embeds a classical hybrid architecture (the two blocks to the lower right side of figure 1). The sensory-motor functional modules operate on the data for building representations used by other components of the global system. Those modules implement also closed-loop actions.
System’s knowledge cannot be stored in a central unique database. Representations, are rather distributed, and are adapted to the processes related to them. The architecture we propose has this distributed memory feature. Each processing function has its own representations (e.g., object edges for obstacle avoidance, geometric models for fine manipulation), whereas there is a more central representation of a situation as a result of interpretation processes. The coherence of all these representations is an important issue to be addressed. The "Memory" in the architecture is distributed and comprises declarative semantic knowledge, temporal relations (episodic memory), and operational knowledge (procedural memory), the set of rules and procedures representing robot capabilities and skills.
Human-robot interaction and communication is not explicitly depicted in the architecture schema in the figure. The processes responsible for interaction are part of the perceptual, decisional and action processes. One can consider that there is an interaction process "floating" upon the architectural components that are part of an interaction (data processing, language understanding, dialogue generation, etc.). Interaction is therefore an intricate activity of the system itself. The inputs from robot sensors include the communication inputs and the actions include those that are produced for communication.
Several arguments are in favor of a pervasive learning capacity, which has to be realized by different mechanisms. Indeed there is a permanent flow of data incoming from the robot’s sensors and low level processing functions. The perceived environment includes known and unknown objects and situations. Therefore a permanent process should be able to filter the flow, discriminating what is already known, and classify data to produce new representations of space, objects and situations. The architecture has to include such an interpretation/learning activity about the environment, and the robot itself.
The robot acquires knowledge from perception and through interaction. New knowledge could also be produced through internal structuring, associations, deduction, abduction and induction mechanisms. The memory that contains factual knowledge is not just a repository of sensed data, but is an active process, which transforms this data into associated structures through those mechanisms. Robot operational knowledge in terms of skills and rules for example have to be permanently modified and improved, through their evaluation with respect to their outcome. We seek a learning process that produces new skills from more basic ones, by associating perception and actuation to produce sensory-motor representations. This association must take into account the context and the pursued goals, for example through a value function that expresses the degree by which the considered associations enable to accomplish the goals. This value function itself should not be predefined once and for all, but learned so that new associations can be made according to new goals of the robot. This can be a reinforcement learning process.
Even if we have an a priori concept, which express the general theory underlying this project, this architecture will be designed and developed on the basis of the progress in the other tasks in the project and will enable to interleave the perception, action, deliberation, interaction and learning capacities.
Back to Work Packages
RoboErgoSum project is funded by an ANR grant under reference ANR-12-CORD-0030